
Nitin J Sanket
Robockey

Aim:
Design, build and program three robots to find the puck, grab it and score a goal.
Brief Explanation of the project:
The most basic thing the robots had to do was to know where they are on the rink, i.e., localize themselves. In order to do this the robots were equiped with IR cameras extracted from Nintendo Wii controllers. The Wii sensor could sense 4 brightest IR sources in its field of view. A non-symmetrical IR star pattern was placed such that the mid point of the pattern coincides with the mid point of the rink, but they are separated by a height of about 5m. Simple pine-hole camera model and localization based on availability of 4 or 3 stars was used to know the position on the rink.
Now that each robot knows where it is on the rink, the next step is to find the puck. The puck had 8 IR LED's on it. Our robots were equiped with 16 phototransitors multiplexed though an analog multiplexer to save pins. A simple threshold and a linear model based puck position estimation was used. The threshold would be dynamically calibrated everytime the robot was reset to compensate for the changes in the ambient lighting.
Now that we have found the puck, the next step is to drive towards the puck. For this we used a simple hand-tuned PD controller.
To make the process simple we had a MATLAB GUI that displayed the information about the robot on our screen.
Acrobat

Aim:
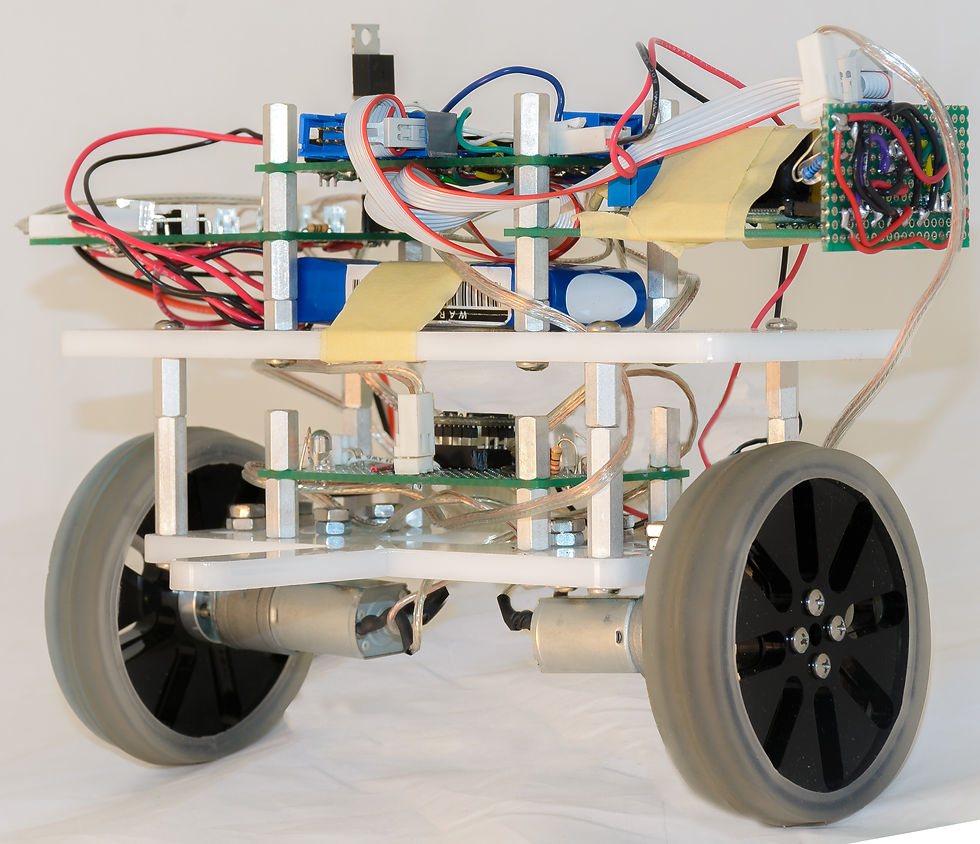
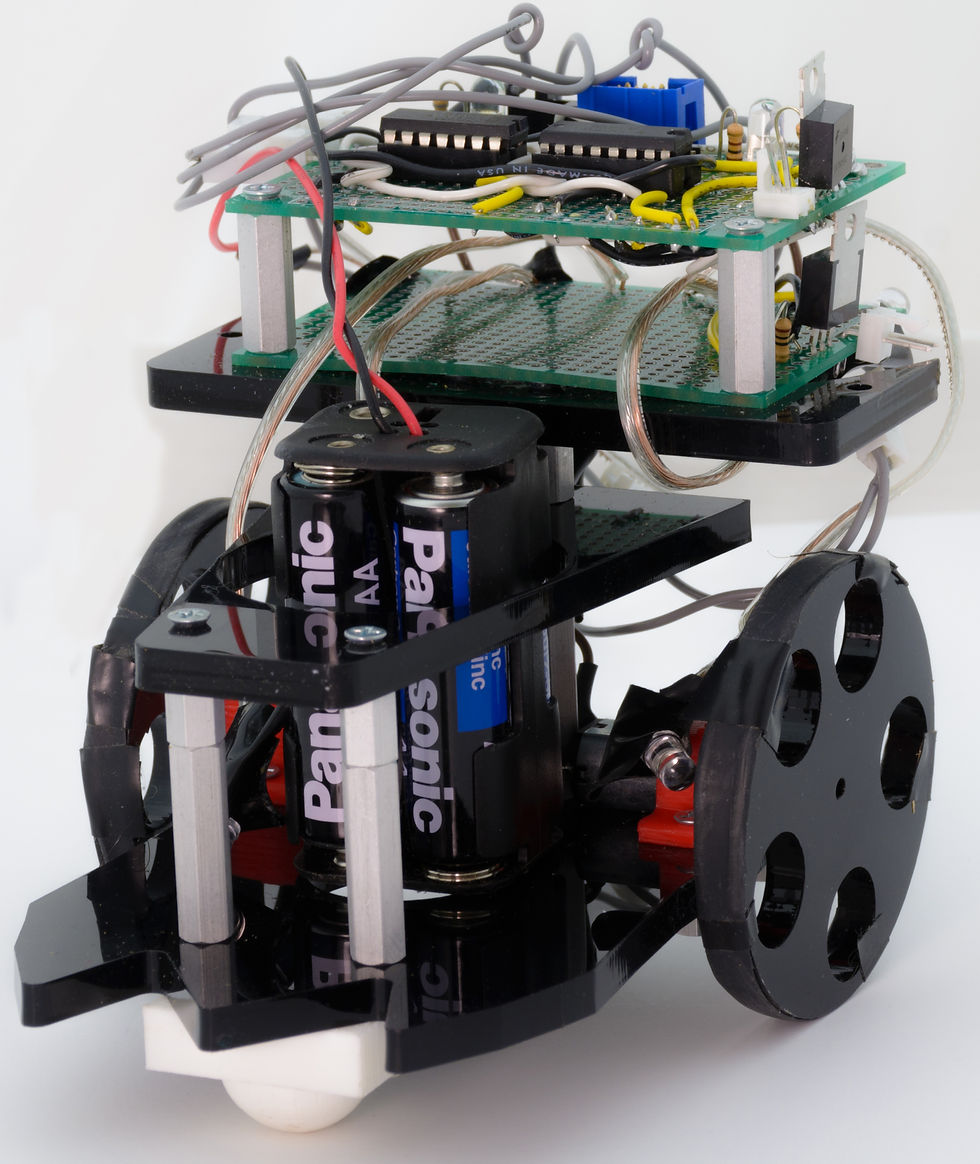
Design, build and program a robot to balance on two wheels with a high center of gravity.
Brief Explanation of the project:
The robot was equiped with a 9DOF IMU with a 3 axis accelerometer and a 3 axis gyroscope. The idea was to use the IMU to measure how far off the robot is from its center position i.e., the equilibrium position of the inverse pendulum robot.
A simple complementary filter was used to fuse the acceleromter and gyroscope data to find the angle the robot is off from the equilibrium. This information was then used as input to a hand tuned PD controller.
Orchestra


Aim:
Design, build and program an instrument to play a specified tone for the specified duration, where the tone and duration would be specified wirelessly. The big picture was that the professor would send out the necessary tones and durations to different students in the class to play the "Happy Birthday" tone.
Brief Explanation of the project:
The tone was generated using a sine table to generate a crude sine wave. This crude sine wave was later smoothened using a bandpass RC filter. This signal was amplified using a MOSFET. The wireless interface as through RF.
Labriynth

Aim:
Design, build and program a robot to solve a maze without using microcontrollers.
Brief Explanation of the project:
A simple wall following robot was build using logic gates.